Image Alignment
Image alignment or registration algorithm computes parametric correspondence relationships among images with varying degrees of overlap. The image alignment process is based on three core technologies – feature detection, robust matching of features and estimating camera poses and refining them using bundle adjustment.
Robust Feature Detection

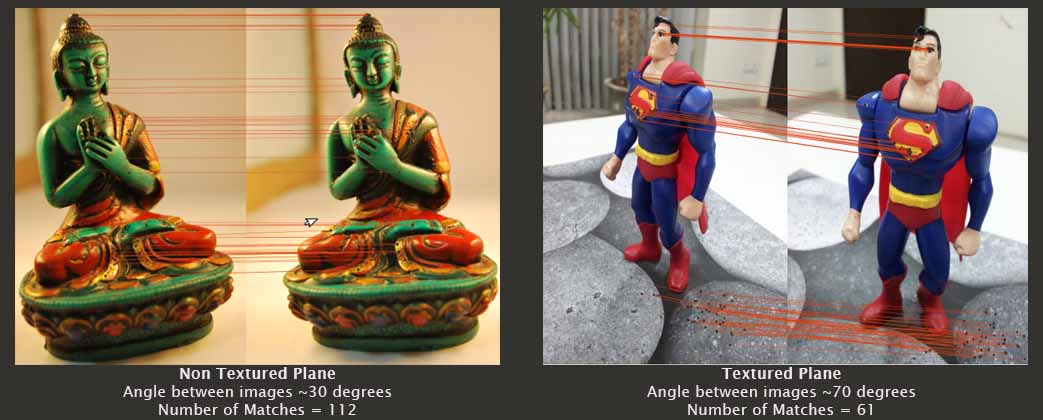

Feature Detection refers to the computation of local image feature point, which can be matched across more than one images. A scale independent feature point can be matched across different level of zoomed images, similarly a rotation independent feature point can be matched across images which have gone small or moderate rotation. An affine feature point on the other hand can be matched across images, which have gone pretty significant amount of variation (though the feature points should be visible in the images). Our feature point detection is scale and rotation independent as well as approximately affine changes independent. Because of the robust feature detection and matching, the image alignment works even in smaller number of pictures taken of an object (from wide angles ) and because of this , Neitra 3D can produce good reconstructions for even quite small set of images.
Bundle Adjustment
Bundle adjustment refers to jointly refining a set of initial camera and structure parameter estimates for finding the set of parameters that most accurately predict the locations of the observed points in the set of available images. We use our developed , fast and robust method of bundle adjustment for refining the estimated camera parameters and sparse 3d geometry to good accuracy.
Object Segmentation and visual hull estimation
Object segmentation refers to automatically obtaining a segmentation of a rigid object in a sequence of images that are calibrated for camera pose and intrinsic parameters. Though our method also gives flexibility of user input during segmentation. It is based on fast superpixelization of images and since it works on super pixels , the segmentation process is very fast.
Visual hull is a concept of a 3D reconstruction by a Shape-From-Silhouette (SFS) technique. In Neitra Visual hull estimation works in tandem with object segmentation. The object segmentation produces silhouette of the object in aligned images , which are further used to produce visual hull.
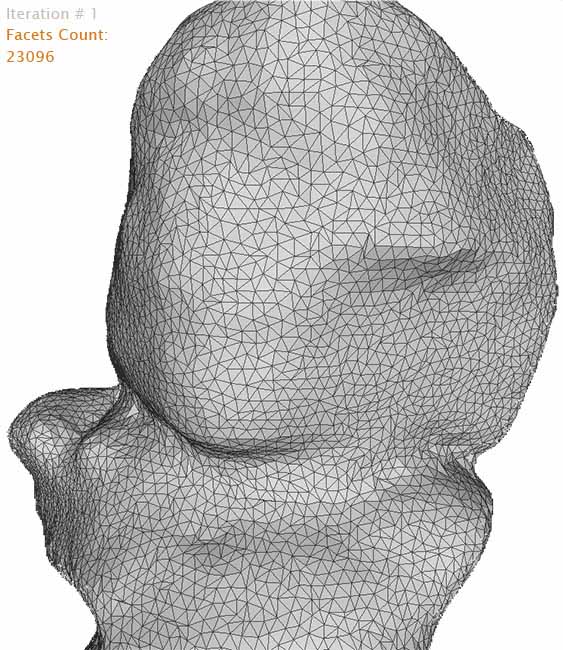
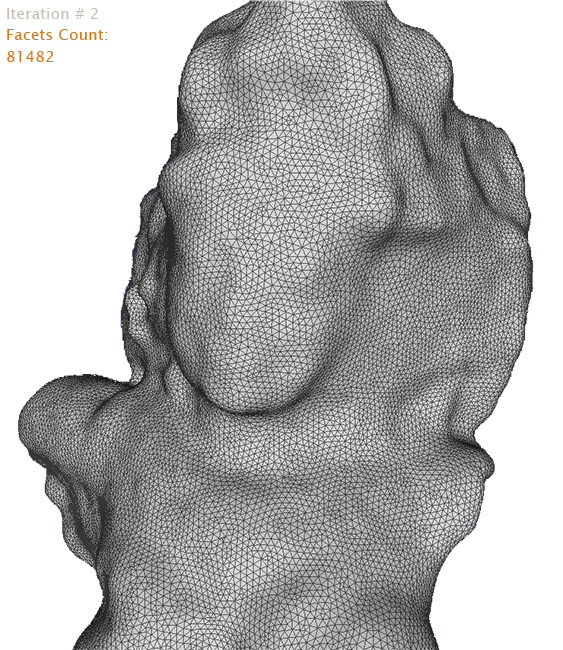
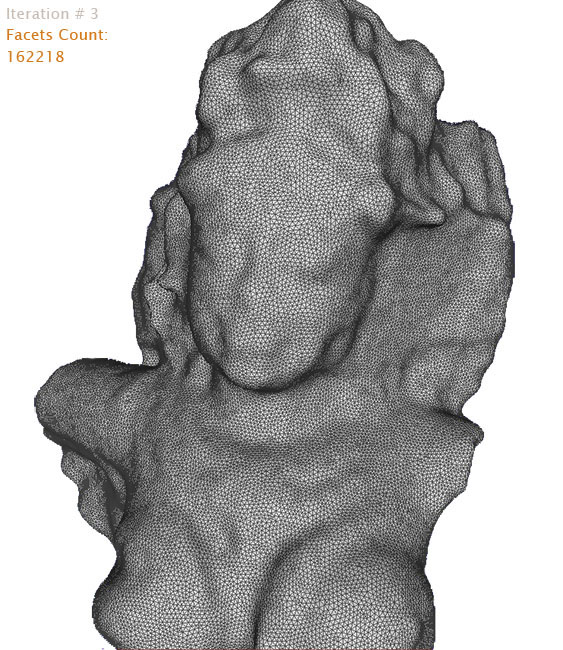
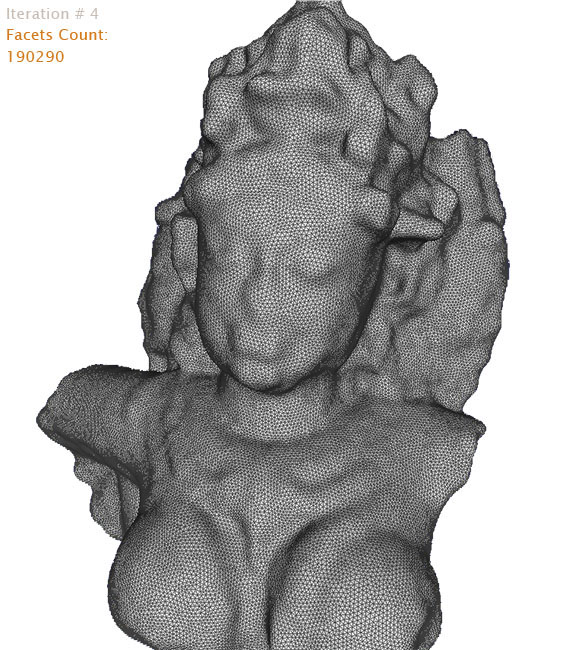
Refine Coarse Model